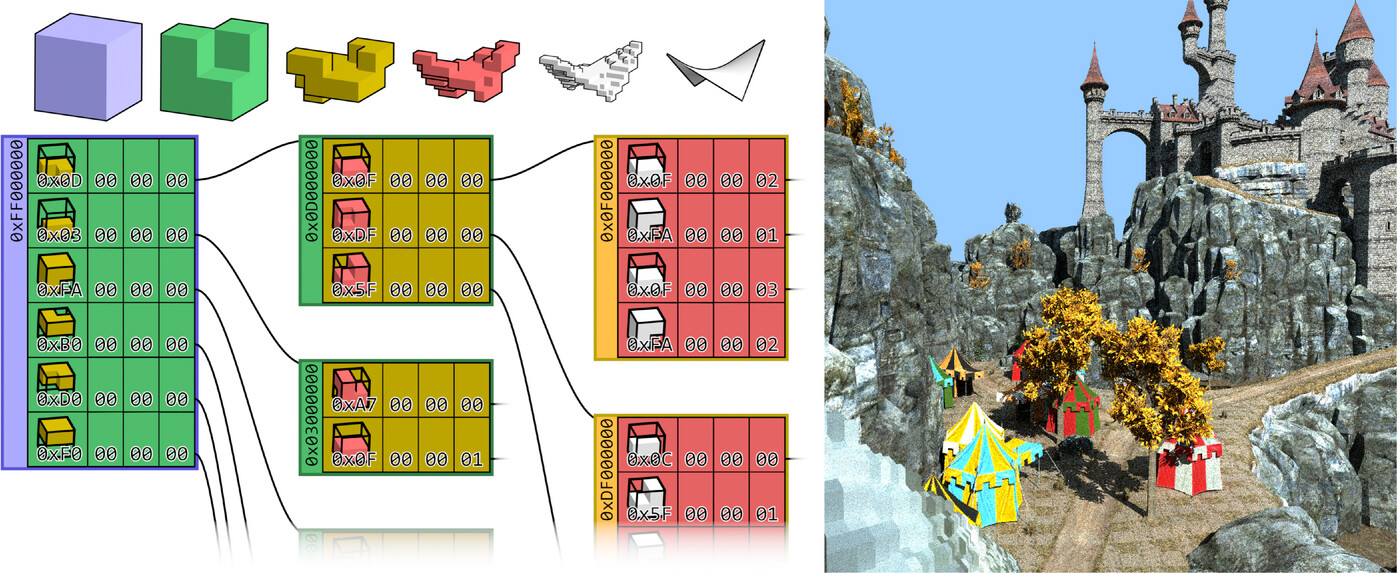
Common Subtree Merging Compressed Opacity Micromaps
Thomas Chernaik, Jaina Modisett, Markus Billeter
29 June 2026
doi: 10.1145/3820017
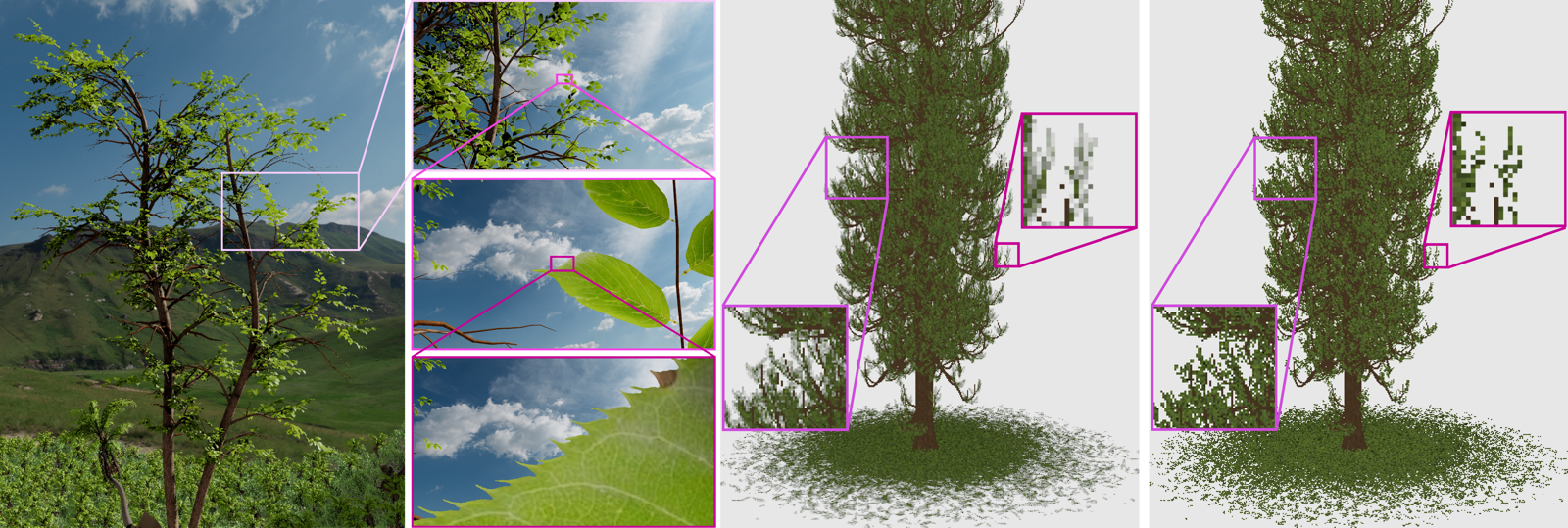
Abstract: Alpha masked geometry is very prevalent in 3D scenes. It is commonly used to express complex shapes while limiting the need for additional polygonal geometry. A predominant use case is foliage rendering, where leaves often have complex and curved edges with fine detail. Opacity micromaps (OMMs) provide a substantial improvement to ray tracing alpha masked geometry. We present a novel method of lossless compression for opacity micromaps using common subtree merging that supports real-time random access without decompression. We demonstrate reductions in memory usage of up to two orders of magnitude compared to standard OMMs, with similar rendering performance. Our method includes aggregate hierarchical opacity for OMMs. With it, we can estimate the opacity at intermediate levels of detail, making it possible to reduce aliasing from fine detail. Further, we demonstrate that our compression can be applied to binary alpha mask textures, requiring as little as 0.05 bits per texel.